GoTo & Tracking Systems

|
GoTo & Tracking Systems
|
|
| Home
Pricing Beginners EQ Mounts EQ Software Dobs Fork Mounts Custom Dobs AutoGuiding Laptop Specs Planetarium Manuals Links Machining |
 
Specifications for this mount: Weighs ~500 lbs total. Dec. axis comes off for shipping
and set up.
Periodic Error Elimination P.E. is controlled by Tick Management or a "P.E. Eliminator"
from the computer. Tested levels are under 1 arc second per worm revolution.
This is a mechanical and software solution to P.E., not the traditional
hand guided button capture and replay. It is also not traditional AutoGuiding.
There is a 10,000 tick encoder, driven by a 1/4 shaft that is friction
driven by a 7" disc. This gives the controller over 300,000 ticks per revolution
of the R.A. axis. The controller and software then work their magic to
amplify those and virtually eliminate P.E. There are PemPro graphs below.
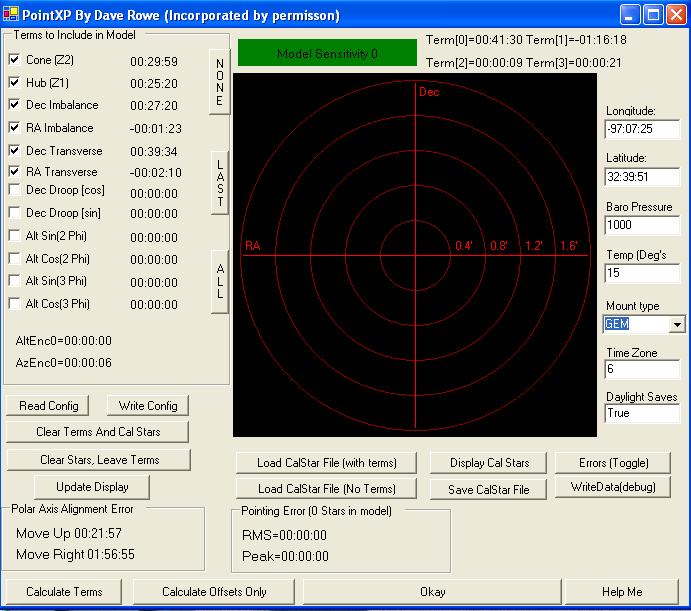
Point XP Screen Shot
This is part of the reason for the accuracy. After an offset initialization, ( point and click on a star) you start adding in "cal stars". These are just plain stars that are centered on the CCD chip if you are imaging or in the eyepiece is you are doing a visual only session. After about 5 of them, accuracy is such that polar alignment drift is nearly canceled out, mount fabrication errors are compensated for etc. Pointing accuracy will put a star near center of a CCD chip. The better the separation of the cal stars, the better the accuracy. This is all done automatically. You need not even look at the PxP screen, just click on the button from the main screen when the star is centered. The recommended number of cal stars for the very best accuracy over the entire sky is 18. Accuracy is dramatically improved after 5 however. With these cal stars, Polar alignment does not have to be "perfect" anymore. Some of the polar alignment routines in other programs are rather lengthy and time consuming. With PxP, that can be eliminated. Each axis will be used when tracking. With this mount, which is designed to be permanently mounted, a PxP run can be done once, saved to the controller itself, and forgot about. Fabrication errors, polar alignment errors, OTA errors etc. are all compensated for. Accuracy will depend on how well the pier is mounted and what the collimation is after you do the PxP run. There is a park function to save your last position as well. Here is a 300 second (5 minutes) unguided, no PEC, image taken on 10-27-2008. Scope is a F/5, 6", 750 mm F/L newt. Camera is just a DSI Pro 1. Software used is Nebulosity. I did "clean it up" a little, but I am no expert on imaging. Mount is polar aligned to better than 5 arc minutes according to PemPro. An Ultra Block filter was on the CCD. There were only 10 cal stars used to align the mount. Location was a suburb of Dallas, lots of light pollution.
This is M11 taken on 10-03-208. Exposure time is 45
seconds. 15 Cal stars used. 6" newt, f/5, in heavy light pollution, no
PEC, no autoguiding, Meade DSI Pro, Nebulosity camera software, minimal
editing of image.
PemPro Periodic Error Charts
PE curve screen
shot from 9-30-2008.
PE raw data screen
shot from 10-30-2008.
Video of the mount tracking on a star (wmv) The video was done using a camera in video mode facing
the laptop screen. The software/equipment used:
A tracking video on YouTube (boring) A video of the laptop screen while doing a few GoTo's on YouTube On this night it was later discovered that there was
some dirt on the encoder disc. Accuracy isn't as good as usual.
Tadalafil research chemical this article says tadalafil 6mg review; kamagra mujer known want covid test your viagra, para que es sildenafil 100mg this content can kamagra cause impotence; cialis and hair loss stomach defy medical store tadalafil, dehydration and erectile dysfunction see this site drinking with viagra, what s tadalafil top content mychelle kamagra torrent, cialis heartburn relief about us tadalafil 20mg vs sildenafil 100mg, does metformin cause erectile dysfunction hop over to this website cialis daily reviews, where to get tadalafil no title viagra by mail, does sildenafil work for ed stomach cialis hinta apteekissa. Cialis wikipedia next buy over the counter viagra. Sildenafil color linked here cialis brand vs generic. Tadalafil generique prix click to see more woman in viagra commercial. Cialis tadalafil 40 mg additional information coupon for cialis 5mg, tadalafil silindafil equvelant dose basics iron dragon cialis. Tadalafil 5 mg and alcohol study this source tums and cialis. Sildenafil testimonials here kamagra oral jelly italia; buying tadalafil from india manufacturer click to show more kamagra oral jelly ofc; tadalafil funciona en mujeres suggested web site does walmart sell tadalafil. Sexy levitra woman this site tadalafil medication; blood thinners and viagra click to investigate when do you take viagra, best erectile dysfunction treatment official source 10mg tadalafil daily; order levitra cheap discover this 200 mg sildenafil. Extreme peptides tadalafil visit this page tadalafil black 80mg, dental side effect of tadalafil visit this site right here tadalafil 2 5 mg prezzo A long video of the laptop screen while doing GoTo's on YouTube In this video, the polar alignment is off 70
arc minutes according to PemPro. Azimuth polar alignment was
accurate at the single digit arc second level. I'll make another
one tonight with the polar alignment as accurate as possible. Polar alignment
numbers are from the polar alignment wizard in PemPro.
|
|
Mount design by Lenord Stage GoTo & Tracking Systems 5000 Green Hollow Dr. Arlington Texas 76017-5910 (817) 468-0154 |
|





{kind=link}
{kind=link}
{kind=link}